Competition document: many drones make light work phase 3
Updated 14 November 2018

© Crown copyright 2018
This publication is licensed under the terms of the Open Government Licence v3.0 except where otherwise stated. To view this licence, visit nationalarchives.gov.uk/doc/open-government-licence/version/3 or write to the Information Policy Team, The National Archives, Kew, London TW9 4DU, or email: psi@nationalarchives.gov.uk.
Where we have identified any third party copyright information you will need to obtain permission from the copyright holders concerned.
This publication is available at https://www.gov.uk/government/publications/competition-many-drones-make-light-work-phase-3/competition-document-many-drones-make-light-work-phase-3
1. Introduction
This Defence and Security Accelerator (DASA) competition seeks proposals for novel and innovative approaches to developing and evaluating the military utility of a swarm of low-cost, small Unmanned Air Systems (UAS) operating as a collaborative mission capability.
£2.5m is available to fund one or more swarming UAS Integrated Concept Evaluations to accelerate from a minimum of Technology Readiness Level (TRL) 3 or 4 to TRL 6 or 7.
The call closes at midday on 28 November 2018.
2. Competition scope
2.1 Background
UAS are currently in widespread use with a range of defence and security users around the world. Current operational systems require at least one, but typically two or more operators to either directly pilot the aircraft or to closely manage the mission flown by an individual aircraft as well as manage aircraft sensors.
The ability to employ a swarm of UAS (considered to be 10 to 20 aircraft in the context of this competition) operating in a co-ordinated and closely coupled fashion to achieve a common goal could be of great benefit to defence. This could support lower operating costs, increased system efficiency and effectiveness as well as increased overall system survivability and resilience.
Phase 1 of the ‘Many Drones Make Light Work’ campaign was launched in August 2016. This phase sought innovative proof-of-concept proposals related to three challenge areas:
- open, modular UAS
- mission management of UAS swarms
- developing technology enabler for UAS swarms
Over 140 proposals were received from industry and academia, which resulted in 13 Phase 1 contracts being issued. These Phase 1 contracts were completed in July 2017.
Phase 2 of the campaign was based on proposals from the Phase 1 contracts. Phase 2 was focused on further developing and proving the effectiveness of specific swarming technology aspects as well as swarming enablers. Nine Phase 2 proposals were contracted, due to be completed in October 2018.
Progress on the Phase 2 technology development and testing has been extremely encouraging. The feasibility and utility of a number of key aspects have been proven through a combination of synthetic environments, bench top tests and live flight evaluations.
Phase 3 of this campaign is seeking to further develop and integrate technologies with the objective of demonstrating a swarming UAS capability, through the flight evaluation. Phase 3 should be considered an Integrated Concept Evaluation.
Phase 3 is open to the wider community to seek a complete technology base to deliver an integrated capability. Technology in this area has been rapidly developing since the original Phase 1 call and reopening the challenge allows other organisations who have been developing capabilities related to swarming UAS to contribute. We actively encourage Phase 1 and Phase 2 participants to contribute to this call as well as new suppliers.
2.2 Scope
We are seeking proposals that will deliver a structured flight evaluation of an integrated swarming UAS capability. The flight evaluation should provide evidence that supports the military utility and effectiveness of swarming UAS performing credible military tasks in an operationally representative environment.
Proposals should describe a programme of work that covers development of a suitable system architecture, further development and incremental testing leading to an evaluation of the complete system.
The technology should be at least TRL 3 or 4 at the start of the competition and achieve TRL 6 or 7 by the end of Phase 3.
3. Competition challenges
Required attributes of the system that are being sought are described in more detail below. Proposals must address all aspects of the system described in this Competition Challenges section.
3.1 A comprehensive end-to-end systems architecture
Figure 1 below shows a high level representation of the proposed swarming UAS architecture and scope, including internal and external interfaces. Although the swarm of flying Unmanned Air Vehicles (UAVs) is the most visible element of swarming UAS, it is the underpinning information architecture that is arguably the most critical element. The swarming UAS information architecture needs to consider:
- tasking, multi-platform collaborative mission planning and platform management
- platform and collaborative sensor planning and management
- on-platform sensor processing including use of target detection / recognition / identification algorithms
- management of transmission of information through the network, including to the swarm control station, and how other systems and decision makers (for example, command and control (C2) nodes, intelligence nodes, manned platforms) would be provided with information gained from swarming UAS
- how data collected by swarming UAS is processed, exploited and turned into information for decision making. This may be either by platforms in the swarm (for example, defining the off platform data fusion and analysis requirements) or by sending information back to the human operator at the swarm control station, including defining the data processing, data analytics and information display needs at the control station
- implementation of an underpinning Geospatial and Intelligence Support Service (GISS) that supports all aspects of the information architecture
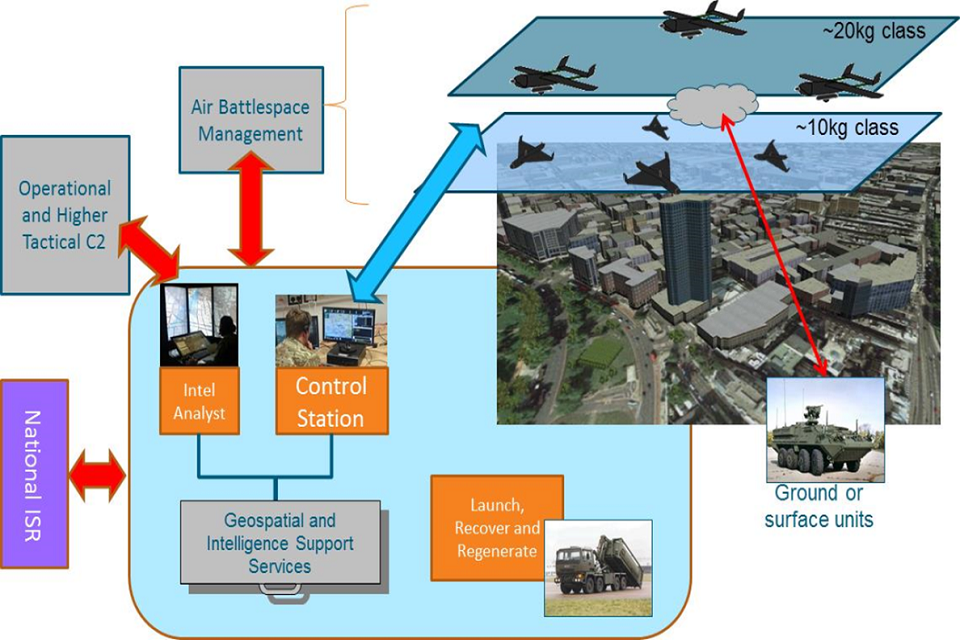
Swarming UAS proposed architecture showing internal and external interfaces
The proposed system solution should be free from International Traffic in Arms Regulations (ITAR) restrictions and use as far as possible. Where ITAR restricted technologies are proposed, this must be clearly stated, as well as the reasons for doing so, including justifying why a non-ITAR restricted technology has not been used.
3.2 UAV platforms and sensors
The focus of the challenge is around the use of smaller (less than 20 kg), low cost, fixed wing UAVs. We are interested in fixed wing UAVs due to the need for endurance and advances in swarm collaborative behaviour developed. We expect a minimum of 10 fixed wing air vehicles, but limited use of multi-rotor UAVs may be acceptable to increase swarm numbers.
The swarm should include a mix of sensors and effectors, including, but not limited to; electro-optic (EO) and infra-red (IR), passive radio frequency (RF) for sensing, and active RF for sensing and delivering effects such as jamming. (Active RF sensing covers a wide range of RF sensing including ground moving target indication, RF imaging using synthetic aperture radar techniques, or using RF emission to stimulate a transmitter to get it to transmit more useful information for sensing purposes).
The swarming concept we want to develop is based on a maximum of one or two sensor types being installed in each platform. This is to keep the individual platform unit cost to a minimum, although we would expect to see a modular airframe concept which allows sensors to be readily changed on platforms to alter the sensor mix of the swarm at mission planning phase.
We expect to see platforms using the same sensors collaborating to deliver a more effective capability, as well as collaboration between platforms of different sensor / effector types to delivery an effective military capability.
When in military service, the swarming UAS will need to operate in a wide range of environmental conditions, including during the day, at night and in poor weather conditions – poor visibility, high winds, heavy rain, high and low temperatures including icing conditions. Proposals should include details of the environmental limits that the offered system will operate in.
3.3 Mission systems
We are looking for a system architecture that uses best practise in terms of open and modular hardware and software implementation. The proposal must include details of what standards and message formats will be used.
The ability to reconfigure the modular software and hardware elements of the systems will be critical to cost-effectiveness of the swarm. These modular elements will provide a common core capability that can be reused and reconfigured for different swarming deployments. Proposals should include details as to how this modularity will be implemented and demonstrated over the course of the work.
For the platform sensors we are looking to leverage the latest technology developments, especially around the use of reconfiguring software defined radios (SDR). The proposal should include an integrated RF sensor system architecture that considers communications, electronic surveillance, RF imaging (passive and active) as well as delivery of RF effects through common hardware, coupled with appropriate wideband antenna tailored for use on small UAVs.
As part of Phase 3, we are seeking to include some specific Government Furnished Assets (GFA) in the form of a payload that will need to be integrated onto a platform and included in the flight trial elements of your proposal. Specific details will be released to successful bidders, but the weight of the payload is not likely to exceed 4 kg, with power requirements unlikely to exceed that of active RF sensors of this size.
3.4 Mission management
We are looking for a swarm mission management system that is based on a robust and tested autonomy architecture. The proposal must include details of the autonomy architecture, including swarming behaviours that have been previously developed. The proposal should explain what additional behaviours will be developed to support the flight evaluations.
The human operator to swarm interface is critical to the successful control and coordination of the swarm, and so the use of a human centred design process is important. The proposal should include details of the interface, what development and testing has occurred to date and how the interface would be further developed in preparation for the flight evaluations.
The ability for the human operator to reconfigure and change the swarming behaviours is also important to ensure that the swarm mission tactics can be quickly updated without requiring a deep understanding of software coding. We require that this functionality is included in the swarm mission management and the proposal must detail how it will be achieved.
One of the critical success factors of this challenge is the ability for a small team of operators to manage a large number of UAVs. Research undertaken so far has shown that the team could consist of one operator to manage the platforms and one or two operators to manage the sensors and information. The proposal must include details on the expected role of the human operator team in managing the swarm.
3.5 Communications and networking
To maintain the capability achieved up to the end of Phase 2, as a minimum the communication and network element shall:
- provide comprehensive end-to-end open systems architecture of an advanced mesh network to support simultaneous data exchange (for example: video, position location and indication (PLI), and voice and data services)
- support the needs of collaborative planning, data exchange and exploitation
The proposals must include full technical detail of the mesh networking technology to be used.
The desirable SDR characteristics are: very low size weight and power, retaining full programmability of the radio platform and protocols.
In order to capitalise on previous Phase 2 technology development and to maintain cross links with other Phase 2 activities, we would like to see the use of Ministry of Defence (MOD) owned waveforms (for example ELGAR/Urban Data Link), that may be implemented on open system SDR hardware. More information is available in Annex A.
As a minimum, multi-frequency, multi-channel and frequency adaptive agile radio SDR should be used. The radio system network will include techniques to dynamically optimise the network based on an understanding of the real time radio performance of the mesh nodes and the data information to be exchanged between them.
The SDR chosen must be able to be spectrally programmed for military requirements in the range 70MHz – 6GHz.
The mesh network proposed should use techniques to minimise the probability of RF detection and interception, as well as adapting to accidental or deliberate electromagnetic interference.
The radio emission should have a function to obfuscate or protect its presence in the RF spectrum.
The open system architecture should be scalable to at least 30 nodes.
The communication and networking element must be free from ITAR restrictions and use.
3.6 Resilience, robustness and survivability
The ability to operate swarms in hostile environments is an essential part of the challenge. Proposals must include technologies and techniques that enable the UAVs to operate effectively when Global Positioning System (GPS) is denied.
We are looking to understand how the swarm would continue to support the military task when communications have been temporarily lost between the control station and the swarm.
We are looking to include a non-kinetic counter-swarm element as part of the flight evaluation of this challenge. This could include both counter-GPS and counter communications techniques. The counter-swarm systems will be put in place and managed by the Dstl team during the flight evaluation. Suppliers will be briefed on these systems during the work-up to the flight trials. Details of system performance and location will be supplied, such that the counter-swarm element can be safely incorporated into the trial’s planning and execution.
The overall resilience and robustness of the swarm must form part of the flight evaluation. The system must be able to degrade gracefully and reconfigure as individual air vehicles are lost due to accident or hostile act. The proposed system must include autonomy behaviours that manage overall system health and effectiveness. As part of the flight evaluation, the system must be able to simulate vehicle faults that require the swarm to re-plan and re-optimise in real time.
3.7 Military tasks
We are interested in a range of applications from the swarming system. These include, but are not limited to:
- supporting Army operations in a complex land battlespace; searching over a large area with a combination of EO/IR and RF sensors to identify objects of interest. This should lead to a detection of an object of interest, resulting in a cross cue and change in swarming behaviour to recognise, identify and track the object of interest. The mission chain may result in passing off the object of interest to another external system, or employing non-kinetic effects by a platform within the swarm
- supporting Maritime operations. Searching a cluttered littoral area for threat systems, both on the water and over the land. The search would use a combination of EO/IR and RF sensors, as well as using information from external systems, such as ship radars
- supporting Combat Air/Air Manoeuvre. Supporting manned fixed wing and rotary platforms, searching for difficult land-based targets and threats in complex environments. Use of swarming platforms to detect and jam enemy threat systems at a long range from the swarm control station
We are not expecting all of the military tasks to be covered in detail. We would expect a focus on one or two aspects, but the project must include a practical demonstration as to how the hardware and software systems could be deployed and configured to support tasks in a different domain.
3.8 Evaluation
We are looking for a staged approach to evaluation. Proposals could consider the use of synthetic environments such as live-virtual trials as a way of de-risking system integration in preparation for live flight trials.
The final flight evaluation series shall include at least 10 small fixed wing UAVs operating simultaneously, conducting a representative mission based on the military tasks outlined above.
For the final flight evaluation we are expecting the air vehicles to operate collaboratively, controlled and coordinated by a small team of operators from a single control station.
The use of mixing live and virtual platforms in the final flight evaluation could be used to raise the number of platforms controlled the by the operating team. Likewise, the limited use of multi-rotor platforms would be an acceptable and cost-effective way to increase swarm numbers if added to the 10 fixed wing platforms. A diverse sensor/effector mix – EO/IR, passive RF, active RF, performing different roles within the swarm, will be required.
The evaluation must include a performance assessment of the sensors employed both from single sensor and fused multi-sensor employment. We need to understand and quantify the system performance in terms of timelines and accuracy.
The final flight evaluation series should show the swarm operating continuously for at least 120 minutes, including swapping platforms into, and out, of the swarm.
We are looking for a structured flight evaluation that will gather both quantitative and qualitative aspects of swarm performance against the military tasks. Proposals should detail how evaluations would be structured and what metrics would be applied to the evaluations at each stage, from the synthetic environment thought to flight evaluation.
In terms of flight evaluation location, we are currently planning to host the trials on a MOD range. The proposal should provision for this, but should also include a contingency for a supplier provided flight evaluation location should we not be able to provide access to a MOD range.
An operational system will need to operate over a very wide area to provide effective coverage. We would like to see this reflected in the flight evaluations and ideally the flight evaluations include an element operating at beyond visual line of sight (BVLOS), but we accept that this is challenging within current Civilian Aviation Authority regulations. (BVLOS is as defined by the Civil Aviation Authority CAP722, Unmanned Aircraft System Operations in UK Airspace – Guidance). The proposal should clearly state the conditions that the flight evaluations will be flown under, for example, extended visual line of sight (EVLOS) or visual line of sight (VLOS).
4. Clarification of what we want
We are seeking comprehensive proposals that will provide a swarming UAS Integrated Capability Evaluation.
We are looking to integrate state-of-the-art technologies into a swarming UAS capability. The capability is likely to be delivered by a lead systems integrator teaming with a number of other suppliers and so we encourage collaboration.
We want both the platform management and information management aspects to be properly considered and included in the development and evaluation.
Proposals will include all ‘must have’ requirements as detailed in the Competition Challenges section above.
A fully operational system will need to be achieved and demonstrated within the 18 month contract duration.
5. Clarification of what we do not want
We are not seeking proposals for niche technology development or partial system solutions.
We are not looking for a single demonstration of swarming capability, but instead a series of flight evaluations that allow performance data and evidence of capability to be gathered.
We are not looking for weaponised air vehicles to be included in the swarm.
We are not looking for multi-rotor platform-based solution. A minimum of 10 fixed wing air vehicles operating collaboratively are required in order to complete the challenge. A limited use of multi-rotor platforms would be acceptable to increase swarm UAV numbers beyond 10 fixed wing platforms, but these platforms should not be the focal point of the evaluation.
6. Exploitation
It is important that over the lifetime of DASA campaigns, ideas are accelerated towards appropriate end-users, to enhance their capabilities. How long this takes will be dependent on the nature and starting point of the innovation. Early identification and appropriate engagement with potential users is essential.
For this Phase 3 competition it is envisaged that proposals will start at a minimum of TRL 3 or 4, achieving TRL 6 or 7 by the end of the phase. Proposals should articulate the development in TRL of the output over the lifetime of the contract and how this relates to improved operational capability against the current known (or presumed) baseline. Your deliverables (especially the final demonstration) should be designed to evidence both of these aspects.
You may also wish to include some of the following information, where known, to help the assessors understand your exploitation plans:
- the intended defence users of your final product and whether you have engaged with them, their procurement arm or their research and development arm
- awareness of, and alignment to, any existing end-user procurement programmes
- the benefits (for example, in cost, time, improved capability) that your solution will provide to the user
- whether it is likely to be a standalone product or integrated with other technologies or platforms
- expected additional work required beyond the end of the contract to develop an operationally deployable commercial product (for example, ‘scaling up’ for manufacture, cyber security, integration with existing technologies, environmental operating conditions)
- additional future applications and markets for exploitation
- wider collaborations and networks you have already developed or any additional relationships you see as a requirement to support exploitation
- requirements for access to external assets, including additional GFA (beyond the payload), for example, data, equipment, materials and facilities
- any specific legal, commercial or regulatory considerations for exploitation
7. How to apply
Proposals for funding to meet these challenges must be submitted by midday on Wednesday 28 November 2018 via the DASA submission service for which you will be required to register.
The funding of £2.5 million is expected to fund 1 or 2 proposals. If successful, contracts will be awarded for a duration of 18 months.
Further guidance on submitting a proposal can be found here.
7.1 What your proposal must include
When submitting a proposal, you must complete all sections of the online form, including an appropriate level of technical information to allow assessment of the bid and a completed finances section. The proposal must clearly demonstrate a response to each of the DASA assessment criteria.
A project plan with clear milestones and deliverables must also be provided. Deliverables must be well defined and designed to provide evidence of progress against the project plan and the end-point for this phase.
A resourcing plan should also be provided that identifies, where possible, the nationalities of those proposed Research Workers that you intend working on this phase. In the event of proposals being recommended for funding, the DASA reserves the right to undertake due diligence checks including the clearance of proposed Research Workers. Please note that this process will take as long as necessary and could take up to 6 weeks in some cases for non-UK nationals.
You should identify any ethical, legal or regulatory factors within your proposal and how the associated risks will be managed, including break points in the project if approvals are not received. Further details are available in the DASA guidance.
In addition, requirements for access to Government Furnished Assets (GFA) must be included in your proposal. DASA cannot guarantee that GFA will be available beyond the offered payload referenced above.
Completed proposals must comply with the financial limit set for this Phase which is up to £2.5 million. Proposals will be rejected if they exceed this limit.
7.2 Public facing information
A brief abstract will be requested if the proposal is funded. This will be used by DASA and other government departments as appropriate, to describe the project and its intended outcomes and benefits. It will be used for inclusion at DASA events in relation to this competition and placed on the DASA website, along with your company information and generic contact details.
7.3 How your proposal will be assessed
All proposals will be checked for compliance with the competition document and may be rejected before full assessment if they do not comply.
Only those proposals that demonstrate their compliance against the competition scope and DASA criteria will be taken forward to full assessment. Failure to achieve full compliance against the mandatory criteria will render your proposal non-compliant and will not be considered any further.
Mandatory Criteria
| The proposal clearly and succinctly outlines how it meets the scope of the competition. | Within scope (Pass) / Out of scope (Fail) |
| The proposal fully explains in all three sections of the DASA submission service how it meets the DASA criteria | Pass / Fail |
| The proposal clearly details a financial plan, a project plan and a resourcing plan to complete the work proposed in Phase 3 | Pass / Fail |
| The proposal identifies the need (or not) for MODREC approval | Pass / Fail |
| The proposal identifies any GFA required for Phase 3 | Pass / Fail |
| Maximum value of proposal is £2.5 million | Pass / Fail |
| The proposal fully describes a comprehensive end-to-end systems architecture that considers both multi-platform control and information management aspects | Pass / Fail |
| The proposed final flight evaluation is focused on the use of a minimum of 10 low-cost fixed-wing platforms, equipped with a mix of sensor and effector types | Pass / Fail |
| The proposal includes details of the autonomy architecture, including swarming behaviours that have been previously developed. The proposal explains what additional behaviours will be developed to support the flight evaluations | Pass / Fail |
| The proposal includes details of the human operator to swarm interface, what development and testing has occurred to date and how the interface would be further developed in preparation for the flight evaluations | Pass / Fail |
| The proposal includes full technical detail of the mesh networking technology to be used with an explanation as to how it will deliver the performance required to support the flight evaluations. | Pass / Fail |
| Use of ITAR restricted technologies has been fully defined and justified. Communications and networking technology is free from ITAR restrictions | Pass / Fail |
| The proposal clearly explains the staged approached to final flight evaluation, including how evaluations would be structured and what metrics would be applied to the evaluations at each stage. | Pass / Fail |
| The proposal must cover how the product will be matured in a representative environment and how you plan to demonstrate its value by means of a business/economic case. | Pass / Fail |
| The proposal should consider potential collaboration and engagement where possible. | Pass / Fail |
Proposals will then be assessed against the competition assessment criteria by subject matter experts from the MOD (including Dstl), other government departments and front-line military commands. You will not have the opportunity to comment on assessors comments.
DASA reserves the right to disclose on a confidential basis any information it receives from bidders during the procurement process (including information identified by the bidder as Commercially Sensitive Information in accordance with the provisions of this competition) to any third party engaged by DASA for the specific purpose of evaluating or assisting DASA in the evaluation of the bidder’s proposal. In providing such information the bidder consents to such disclosure. Appropriate confidentiality agreements will be put in place.
Further guidance on how your proposal is assessed is available on the DASA website.
After assessment, proposals will be discussed internally at a Decision Conference where, based on the assessments, budget and wider strategic considerations, a decision will be made on the proposals that are recommended for funding.
Proposals that are unsuccessful will receive brief feedback after the Decision Conference.
7.4 Things you should know about DASA contracts
Please read the DASA terms and conditions which contain important information for suppliers. For this competition we will be using a bespoke contract, a copy of which is available on request.
Funded proposals will be allocated a Technical Partner as a technical point of contact. In addition, the DASA team will work with you to support delivery and exploitation.
We will use deliverables from DASA contracts in accordance with our rights detailed in contract terms and conditions.
8. Phase 3 dates
| Competition opens | Thursday 18 October 2018 |
| Dial in | Wednesday 31 October 2018 |
| Pre bookable 1-1 telecom sessions | Wednesday 31 October 2018 |
| Competition closes | Wednesday 28 November 2018 at midday |
| Contracting | Aim to start contracts January 2019 and end 18 months later in July 2020 |
8.1 Supporting events
Wednesday 31 October 2018 – A dial-in session providing further detail on the problem space and a chance to ask questions in an open forum. If you would like to participate, please register on the Eventbrite page.
Wednesday 31 October 2018 – A series of 20 minute one-to-one teleconference sessions, giving you the opportunity to ask specific questions. If you would like to participate, please register on the Eventbrite page.
9. Help
Competition queries including on process, application, technical, commercial and intellectual property aspects should be sent to accelerator@dstl.gov.uk, quoting the competition title.
While all reasonable efforts will be made to answer queries, DASA reserves the right to impose management controls if volumes of queries restrict fair access of information to all potential suppliers.
10. Annex A: Communications and networking
10.1 Background
The MOD is continually facing a congested use and a denial of the available spectrum for military users, and has to support the sharing of the spectrum with other military operational mission partners, providing a system robustness and resilience capability. This SDR design addresses the need to efficiently allow users to deploy over wide urban geographical areas and co-exist with other users through intelligent networking and bandwidth efficiency implementations. The functional description and operational relevance of this SDR initiative has a direct relevance to current communications and datalink programmes as it is directed primarily at a bandwidth enhancement and network efficiency solutions through ad hoc network techniques that could be provided and the capability of being agile across different architectures and configurations.
10.2 Advancing Important Innovation
This SDR has the potential to develop UK sovereign capability in wide area communications requirements through novel meshing algorithm design and is potentially a core element in enhancing MOD’s understanding of this complex technology. This SDR architecture drives to the heart of enhancing what is a critical capability need within land, sea and air communication environments and could help drive an understanding of this technology to allow industry to participate in future implementations.
10.3 Technical Background
A compact and lightweight SDR covering 70MHz to 6GHz (transmit and receive) hosts multiple communication waveforms including mesh networking waveforms, resilient point to point waveforms (ELGAR) and other waveforms optimised for the urban environment.
An ITAR-free SDR is compact (typically 52mm by 46mm or less) and consumes a few Watts, depending on the software applications running on the hardware. Due to its light weight (<50g) the SDR is capable of being flown on many small UAS platforms, or stacked to give multiple RF functions in a compact form factor. The unit also potentially can be used as common hardware, and has been shown to host spectrum sensing functions and similar utilities on-board.
10.4 Design drivers for the SDR network architecture
| Requirement | Description |
| Miniaturisation | Small form factor implemented on a 100-200g UAV platform, using a small field programmable gate array (FPGA). |
| Low probability of detection (LPD) characteristic | Supports covert signalling with low transmission powers |
| Spectrum aggregation | Support for spectrum aggregation across a wide band for ease of spectrum management. |
| Mesh internet protocol (IP) network and relay | Support for Mesh IP networks and relay capabilities. Ability to control multiple nodes from a single Ground Control Station (GCS). |
| Bi-directional link | The datalink should transmit and receive both the command and control (C2) and platform sensor information (including metadata). It is anticipated that on larger platforms, an additional C2 only link will be added for the safety case. |
| Data characteristic | Transfer of audio and video information simultaneously. In a benign environment, standard definition (SD) is required but reduced quality will be accepted in a heavily through-wall situation (as long as the degradation is graceful). It is also capable of transmitting other data (for example JPEG imagery, metadata) |
| Collaborative working | Support for unmanned vehicle/unattended ground sensor suppliers with the integration of a replacement datalink (UDL). |
| Software control | A user interface that can both control and review the datalink, and also enable essential data to be selected and then transmitted over a disadvantaged network. |
| GCS centric | The system is to be designed predominantly around a single GCS operation, with all video feeds to be downlinked to the GCS. |
| Video quality | Video at 320 by 240 at 10fps is sufficient minimum but 640 by 480 is possible. |
| Frequency agility | Intelligent frequency switching modem, which can support 2 x RF channels. |
| Land open systems architecture (LOSA) | Designed to support the principles of LOSA to facilitate compatibility with future Land standards. |
| Image content control | The user is able to manipulate the image in real-time at the user interface to enable maintenance of essential information in the presence of a disadvantaged datalink (for example image letterboxing). |