The search for Philae
Where is Rosetta’s lander and when will it wake up?
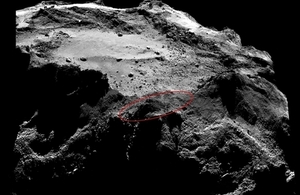
OSIRIS two-image mosaic of 67P showing the current search area for Philae. From this distance of 12 miles (20 km) the lander would only be three pixels across. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA.
Ever since Philae touched down on Comet 67P/Churyumov-Gerasimenko on 12 November the search has been on to identify it in images. While the CONSERT instrument has helped to narrow down a 350 x 30 m ‘landing strip’ on Comet 67P/C-G’s smaller lobe, a dedicated search in OSIRIS images has so far not been able to confirm the little lander’s final location.
Philae’s descent to the surface and first rebound were well-documented with the OSIRIS narrow-angle camera. The team also identified what they believe to be the lander in a wide-angle shot taken above the rim of the large depression – named Hatmehit – on the comet’s small lobe. The image has been used to guide subsequent lander search efforts, and provides the basis for trajectory reconstructions. According to data recorded by Philae’s ROMAP instrument, the lander may have grazed the surface so this image may have captured the result of that encounter.
Follow-up imaging campaigns of the comet have not been successful in locating the lander. The campaigns specifically targeted the times that the lander would be illuminated and when Rosetta had the correct orbital position to be able to image it. However, the cameras were looking into long cast shadows from Rosetta’s terminator orbit, perpendicular to the Sun direction, which does not provide the optimum conditions for detecting the lander.
It is also important to note that Rosetta’s trajectory immediately following Philae’s touchdown allowed for good viewing conditions at the original landing site. Now that Rosetta has moved to a different orbit, and is further away from the comet, the chances of observing the lander are less.
The image above is an example of the images being used to search for the lander; it is a slightly cropped 2 x 2 mosaic taken by the OSIRIS narrow-angle camera on 13 December 2014 from a distance of about 20 km to the centre of the comet. For the 20 km imaging run 18 sets of two images were taken – one each with orange and blue filters to take advantage of the reflection of the lander solar panels, which differ compared to the cometary environment. The images were taken in the 2 x 2 rasters to ensure good surface coverage. The lander, about 1 metre across – the size of a household washing machine – would measure only about three pixels across in these images.
Although Rosetta is flying to within 6 km of the comet’s surface on 14 February, the planned trajectory foresees the closest approach on the lower part of the larger comet lobe (although the trajectory also takes Rosetta over the first touchdown point). This trajectory is planned such that the Sun will be directly behind the spacecraft, allowing the acquisition of shadow-free images. The close flyby will also allow the suite of science instruments on the orbiter to take spectra of the surface with unprecedented resolution and to directly sample the very innermost regions of the cometary coma in order to learn more about how the comet’s characteristic coma and tail develop.
When will Philae wake up?
For those of you who followed the wake-up of Rosetta, you will know that it is not simply a case of switch on and get back to the science right away. The same goes for Philae.
At the original landing site, Philae was expected to receive around 6.5 hours of illumination per 12.4 hour comet day, with temperatures becoming too high by March 2015 to enable continued operations. Now, at its new location, the illumination is just 1.3 hours.
In fact, even by May, the Sun inclination will be such that it will be directly overhead of the predicted landing zone, although the lander’s orientation is such that it won’t be able to make full use of the maximum illumination on offer.
As for the process of wake up, and assuming Philae survived the low temperatures in its new residence, the earliest that the lander team expect it to be warm enough to boot up is in late March. But it will likely be May or June before there is enough solar illumination to use its transmitter, and to re-establish a communications link with Rosetta – the lander needs about 17 Watts to wake up and say “hello”. Furthermore, the orbiter also has to be commanded to listen for Philae’s “I’m awake” signal, and be in a good position relative to the landing site to pick up the signal – although it can be up to 200 km away from the comet. It will be longer still before the battery is fully charged and Philae is ready to do science again, but that means there is a chance it will have a ringside seat for perihelion.
But even if Philae doesn’t wake up, it’s important to remember that it already completed its first science sequence on the comet, unexpectedly providing information from multiple locations on 67P/C-G.
Meanwhile Rosetta will continue to follow the comet on its orbit around the Sun and as it heads back towards the outer Solar System. Rosetta and the UK
With funding from the UK Space Agency and the Science and Technology Facilities Council (STFC), Rosetta is a mission with significant UK involvement from industry and science.
One of the main challenges for all the companies designing instruments for Rosetta has been to ensure the components remain intact for ten years, while the spacecraft makes its way to the comet, and then work perfectly when it gets there. Not an easy task!
Industry involvement
- Airbus Defence and Space, based in Stevenage, was the major subcontractor for the Rosetta platform.
- e2v, based in Chelmsford, designed and supplied the high performance imaging devices used in the Navigation Camera, OSIRIS narrow field and wide field cameras and VITRIS-M instruments on the orbiter and ROLIS and CIVA instruments on the lander
- ABSL Space Products provided innovative batteries for the spacecraft and lander. These are smaller, lighter and much more reliable than the traditional nickel-cadmium batteries.
- ERS Technology supported the development of many subsystems including the reactions wheels, solar array drive motors, Philae harpoon motors and developed the lubricant for the atomic force microscope on the Micro-Imaging Dust Analysis System (MIDAS).
- Technology created by CGI Group helped to explore some of the issues involved in such a long mission. The company was also involved in the development of the Rosetta on board software.
- Moog provided tanks to store the helium used by the lander.
- STFC’s RAL Space co-developed the Ptolemy instrument with the Open University and designed the thermal insulation for the GIADA and VIRTIS instruments as well as the Philae lander itself.
- SciSys UK Ltd is responsible for the spacecraft Mission Control System development and maintenance. In recognition of this work on the Rosetta and the Beagle 2 missions, SciSys were awarded the title of “Innovator of the Year” by the UK Computing Awards for Excellence 2004.
- Surrey Satellite Technology Limited (SSTL) designed a wheel that will stabilise the probe as it descends and lands on the comet.
- Telespazio VEGA was involved in many aspects of the Rosetta mission, from the overall design of the spacecraft to the on-board software.
Science involvement
UK scientists are involved in ten of the 21 experiments that Rosetta will carry out during its mission:
- The Open University in collaboration with STFC RAL Space designed and built the Ptolemy instrument on the lander and is contributing scientific expertise to the GIADA, MUPUS and SESAME instrument teams
- The University of Kent will be helping to analyse the results from the OSIRIS instrument and have been involved in observing Rosetta’s target comet from ground-based telescopes to aid mission planning
- Imperial College London and University College London’s Mullard Space Science Laboratory (MSSL) supply the team studying the comet’s plasma.
- Scientists at Oxford University are part of the science team for VIRTIS.
- Queen Mary College at the University of London will be investigating the results of the CONSERT instrument.
- Researchers from Queen’s University Belfast are part of the team observing Rosetta’s target comet using ground-based telescopes.